Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable
Bonjour,
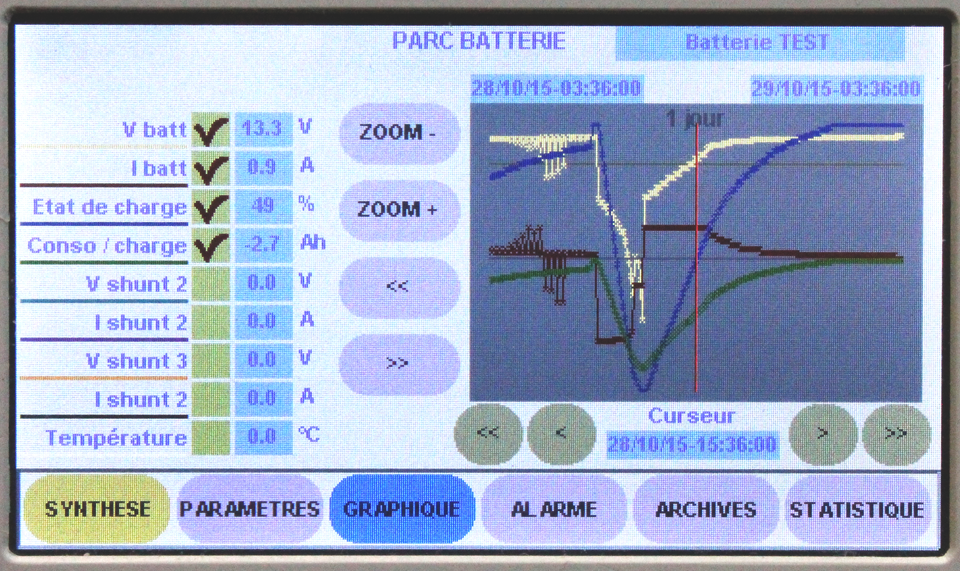
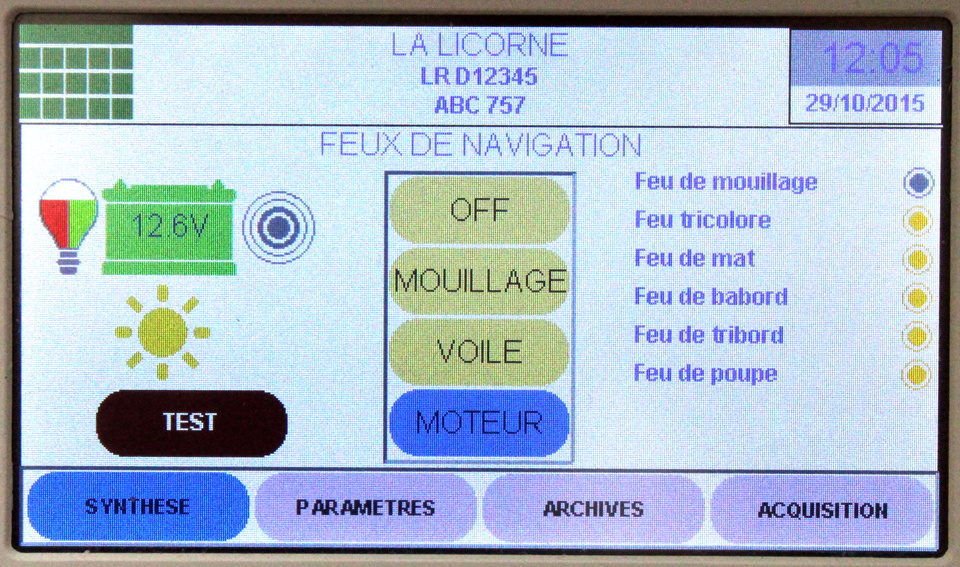
La PME dans laquelle je bosse développe actuellement une centrale de supervision technique basée sur un affichage couleur tactile et des terminaux en réseau (bus LIN) qui prélèvent, traitent et transmettent les données utiles sur l’affichage centralisé.
Une version ’nautique’ sera présentée en commercialisation en fin d’année normalement (salon la Rochelle) qui comprendra au moins la supervision des parcs de batteries, la gestions des réservoirs et cuves, la supervision des pompes de cales et la commande et supervision des feux de nav.
D’autres éléments sont prévus comme la commande à distance de relais, la collecte de contacts, la télécommande radio, l’interfaçage NMEA, etc.
Nous pouvons proposer des conditions intéressantes à quelques ’beta-testeurs’ prêts à consacrer un peu de temps à ce projet moyennant la mise en œuvre des produits sur leur bateau, le retour d’expériences et critiques constructives, la remontée de défauts et le test des correctifs. La réflexion sur des terminaux complémentaires est également ouverte.
J’espère que ce post ne va pas à l’encontre des règles du forum et m’en excuse si c’est le cas mais je précise qu’il ne s’agit pas d’une opération commerciale de ma part.
Merci